Rémi BARRAQUAND is currently an Expert R&D Engineer at INRIA. He graduated from the Grenoble Institute of Technology (Grenoble INP) in 2007, with a major in Graphics, Vision and Robotics. He then received his PhD degree in computer science from the Grenoble University for his work on the design of sociable technologies. http://remibarraquand.com
Amaury NEGRE is a Research Engineer at CNRS since 2008. He graduated from the Grenoble Institute of Technology (Grenoble INP) in 2005, with a major in image processing. Then he received his
PhD degree in vision and robotics from INPG in 2009 for his work on vision based obstacle detection for mobile robots. Now he is with the Grenoble Informatics Laboratory (LIG) and offers engineering support in experimental robotics and ambient intelligence.
Presentation Overview
Plan
Presentation Overview
Introduction to ROS
Motivation for ROS
What is (not) ROS
ROS Concept
ROS Tools
Getting Started with ROS
C++
Python
Java
Show Cases
Personally Assisted Living
Perception for on road vehicle
Robot Prototyping
Conclusion and Perspectives
Live Demonstration
What are the motivations for a common robotic infrastructure?
Introduction to ROS
Motivation for ROS
Motivation for a Common Robotic Infrastructure
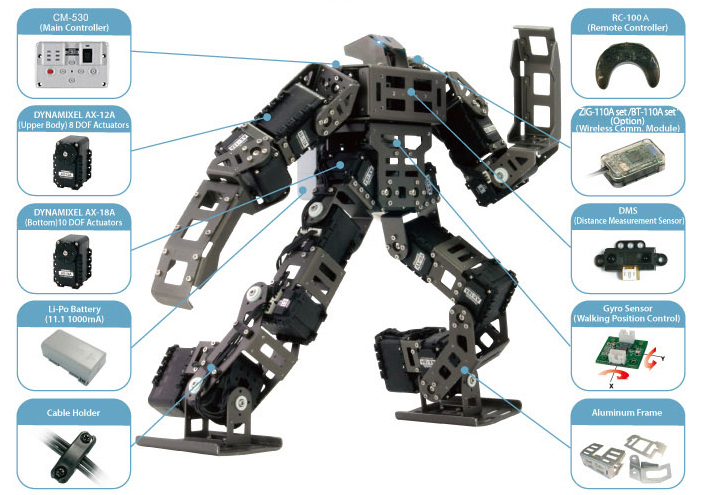
A Robot is a composition of different components
Hardware components
Computational Units (FPGA, PC, Microcontroller, …)
Actuators (Motor, …)
Sensors (Camera, IR, LIDAR, …)
Software components
Hardware drivers
Robot servoing
Perception
Motivation for a Common Robotic Infrastructure
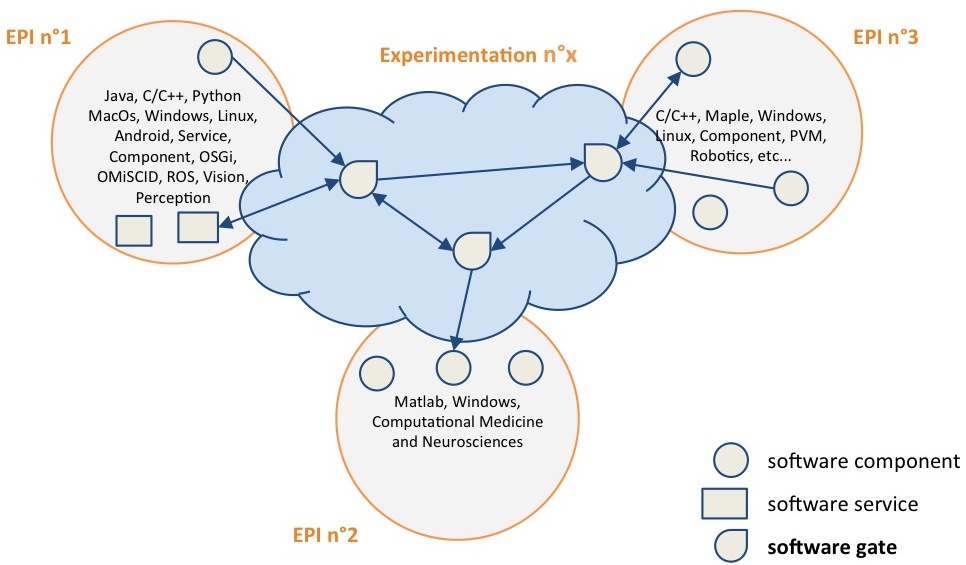
A Robotic application is an interconnection of components
Heterogenous components
Cross-language
Cross-platform
Distributed components
Multi-robots
Multi-PC
Multi-network
Dynamic components
Appear, Disappear (mobility)
Crash, Evolve
Both Robots and a Robotic Applications are an assemblage of many other people's components
⇒ Need for a common Robotic Operating System
What is ROS?
What is (not) ROS
What is ROS
ROS is a 'Meta' Operating System for Robotics Applications
An open source robotics framework
Maintained by Willow Garage (PR2, TurtleBot, ROS, OpenCV, PCL, …)
Cross-platform (Ubuntu, OSx, Windows, Android, …)
Cross-language (C/C++, Python, Java, …)
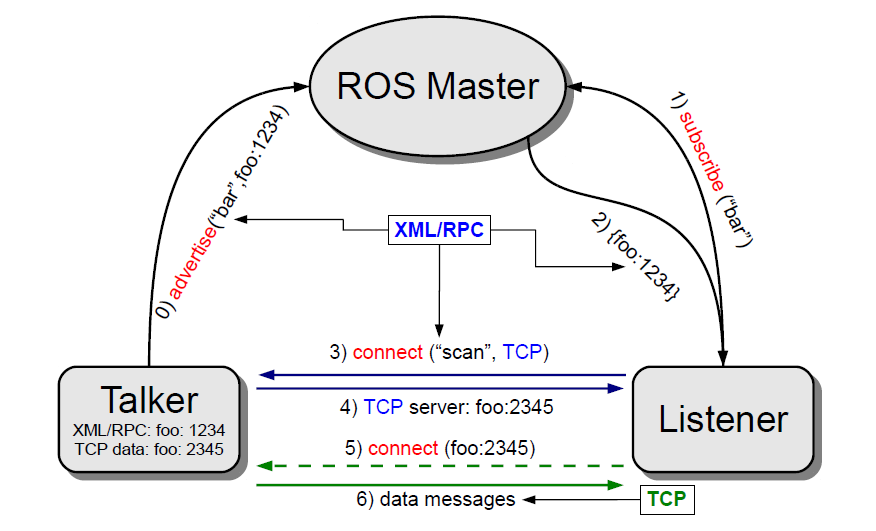
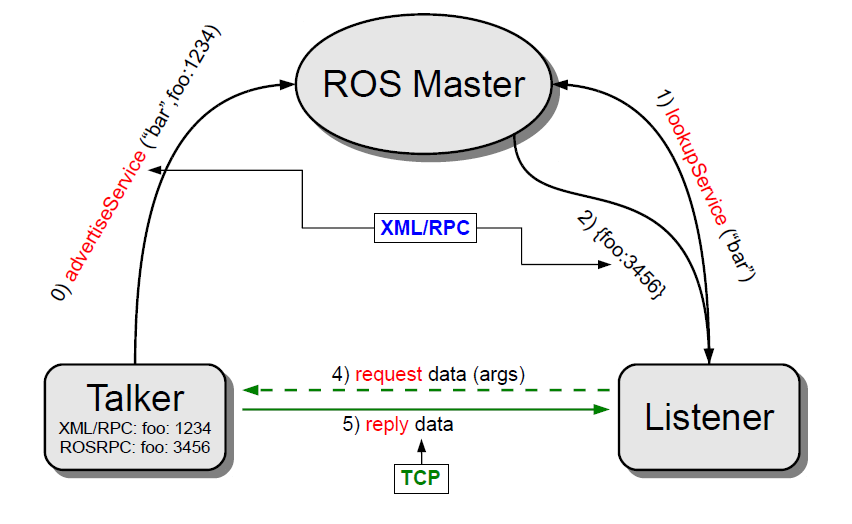
An architecture for distributed inter-process/inter-machine communication and configuration
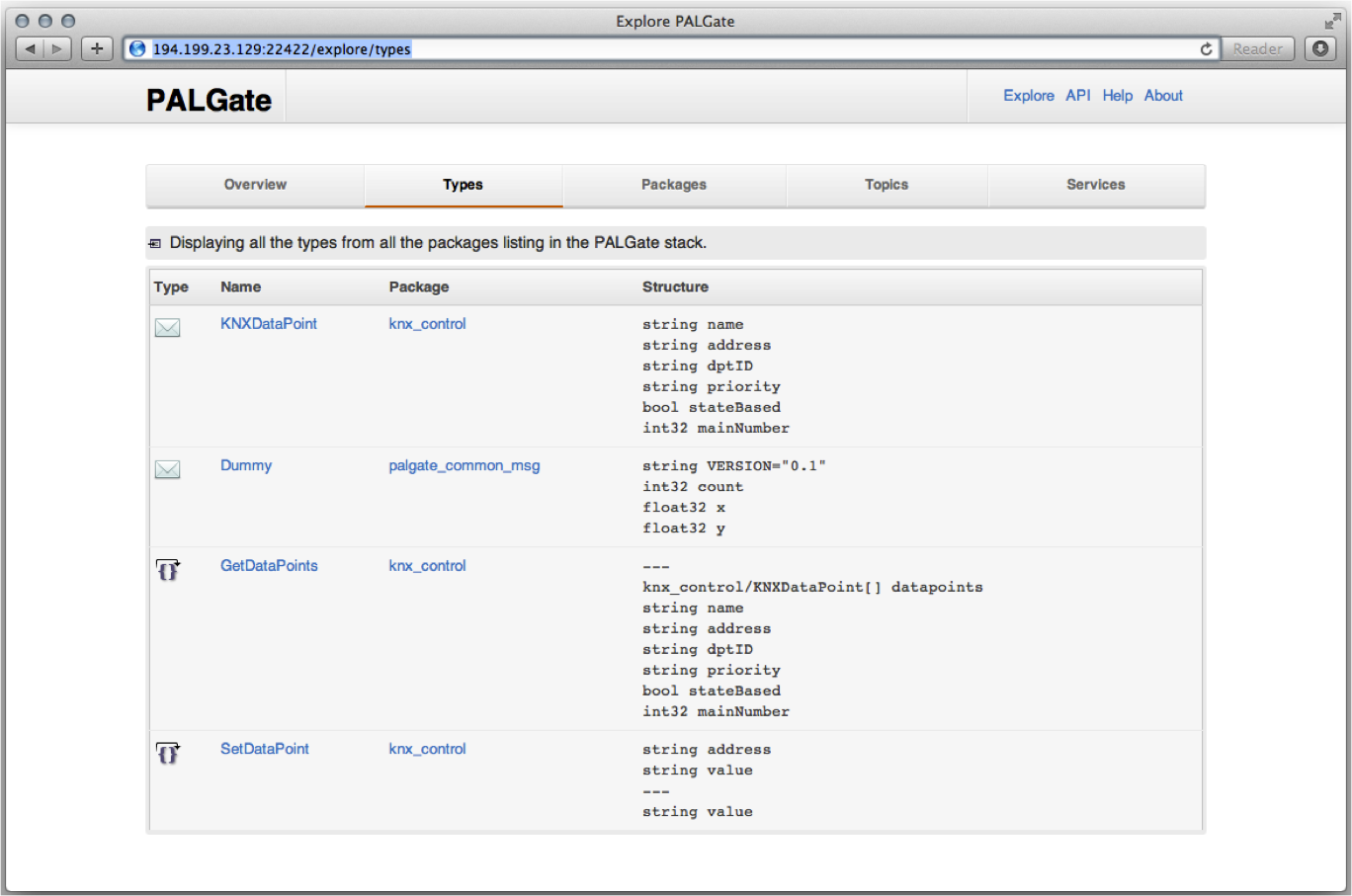
In ROS msg and srv types definition are stored respectively in pkg_name/msg and pkg_name/srv
Create the msg/Custom.msg file
# this is some custom message
string someText
uint8 someNumber
geometry_msgs/Twist[] someTwistArray
Basic data types are:
int{8,16,32,64}
float{32,64}
string
time
duration
array[]
Packages type:
pkg_name/type_name
pkg_name/type_name[]
Publisher/Subscriber in C++
Publisher/Subscriber in C++
Publisher/Subscriber in C++
ROS uses CMake and provides a rosmake command utility
Add roscpp dependency in the manifest.xml :
<depend package="roscpp" />
Edit pkg_name/CMakeLists.txt
#uncomment if you have defined messages
rosbuild_genmsg()
#uncomment if you have defined services
#rosbuild_gensrv()
#common commands for building c++ executables and libraries
rosbuild_add_executable(my_publisher src/my_publisher.cpp)
rosbuild_add_executable(my_subscriber src/my_subscriber.cpp)
Publisher/Subscriber in C++
#include "ros/ros.h"
#include "pkg_name/Custom.h"
int main(int argc, char **argv) {
ros::init(argc, argv, "my_publisher"); // init ROS
ros::NodeHandle n; // handle to create publisher, subscriber, services, etc.
ros::Publisher pub = n.advertise("my/custom/topic", 1000); // create publisher
pkg_name::Custom custom_msg; // Message to be sent
ros::Rate loop_rate(10); // synchronization rate (set at 10 Hz)
while (ros::ok()){
custom_msg.someText="some text";
point_pub.publish(custom_msg); // send the message
ros::spinOnce(); // manage ros events
loop_rate.sleep();
}
return 0;
}
Add a custom task in build.gradle for better integration with rosrun
...
// create a standard binary in /bin for rosrun
task deployApp(dependsOn: 'installApp') << {
File binDir = new File(project.projectDir, '/bin')
if (!binDir.isDirectory()) {
println "Creating $binDir directory"
binDir.mkdirs()
}
File link = new File(binDir,"execute")
File target = new File(project.projectDir, "build/install/$project.name/bin/$project.name")
println "Creating symlink from $link.absolutePath to $target.absolutePath"
ant.symlink(link: link.absolutePath, resource: target.absolutePath)
}
...
Publisher/Subscriber in Java
Put your your Java sources in src/main/java and your tests in src/test/java
Implement a Node
import org.ros.namespace.GraphName;
import org.ros.node.Node;
import org.ros.node.NodeMain;
public class MyNode implements NodeMain {
public GraphName getDefaultNodeName() {
return new GraphName("my_node");
}
public void onStart(ConnectedNode node) {}
public void onShutdown(Node node) {}
public void onShutdownComplete(Node node) {}
public void onError(Node node, Throwable throwable) {}
}
Publisher/Subscriber in Java
public class Publisher extends AbstractNodeMain {
public GraphName getDefaultNodeName() {
return new GraphName("publisher");
}
public void onStart(final ConnectedNode connectedNode) {
final Publisher<pkg_name.Custom> publisher = connectedNode.newPublisher(
"my/custom/topic", pkg_name.Custom._TYPE);
connectedNode.executeCancellableLoop(new CancellableLoop() {
protected void setup() {}
protected void loop() throws InterruptedException {
pkg_name.Custom msg = publisher.newMessage();
msg.setSomeText("Hello world!");
publisher.publish(msg);
Thread.sleep(1000);
}
});
}
}
Publisher/Subscriber in Java
public class Subscriber extends AbstractNodeMain {
public GraphName getDefaultNodeName() {
return new GraphName("listener");
}
public void onStart(ConnectedNode connectedNode) {
final Log log = connectedNode.getLog();
Subscriber<pkg_name.Custom> subscriber = connectedNode.newSubscriber(
"my/custom/topic", pkg_name.Custom._TYPE);
subscriber.addMessageListener(new MessageListener<pkg_name.Custom>() {
public void onNewMessage(pkg_name.Custom message) {
log.info("I heard: \"" + message.getSomeText() + "\"");
}
});
}
}
Publisher/Subscriber in Java
Rebuild and redeploy rosjava (to build java classes/interfaces for msgs and srvs)
Using ROS for Personally Assisted Living Application
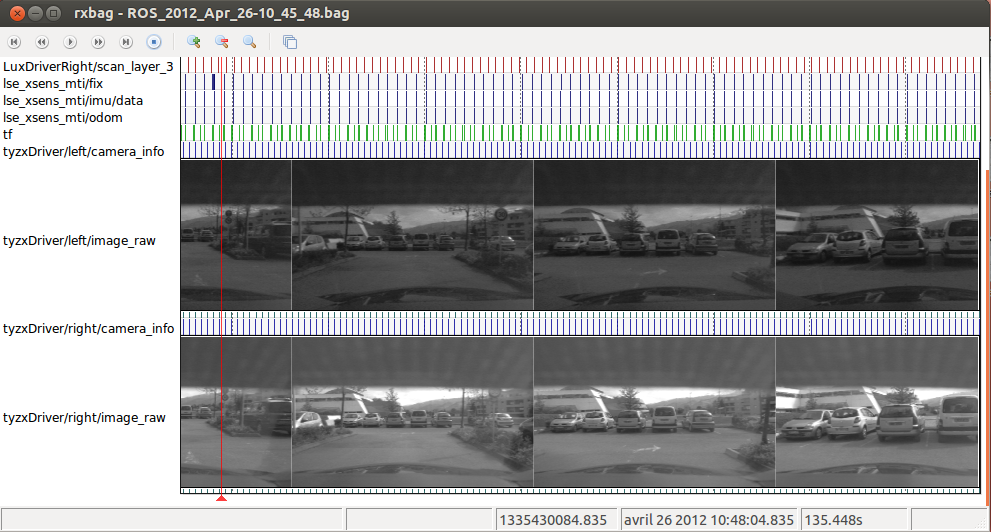
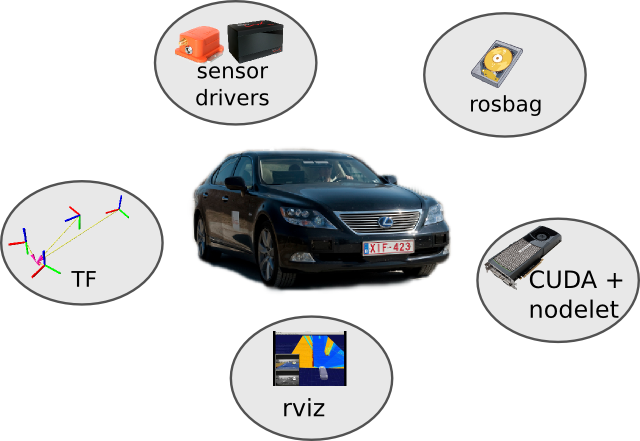
Using ROS for On Road Vehicle Application
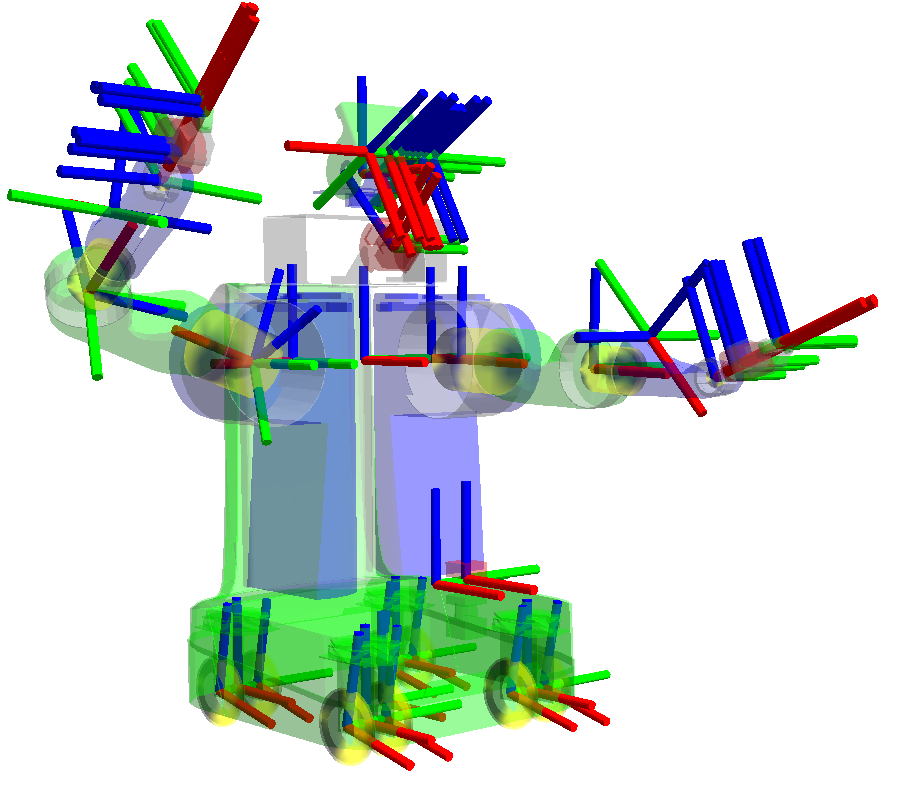
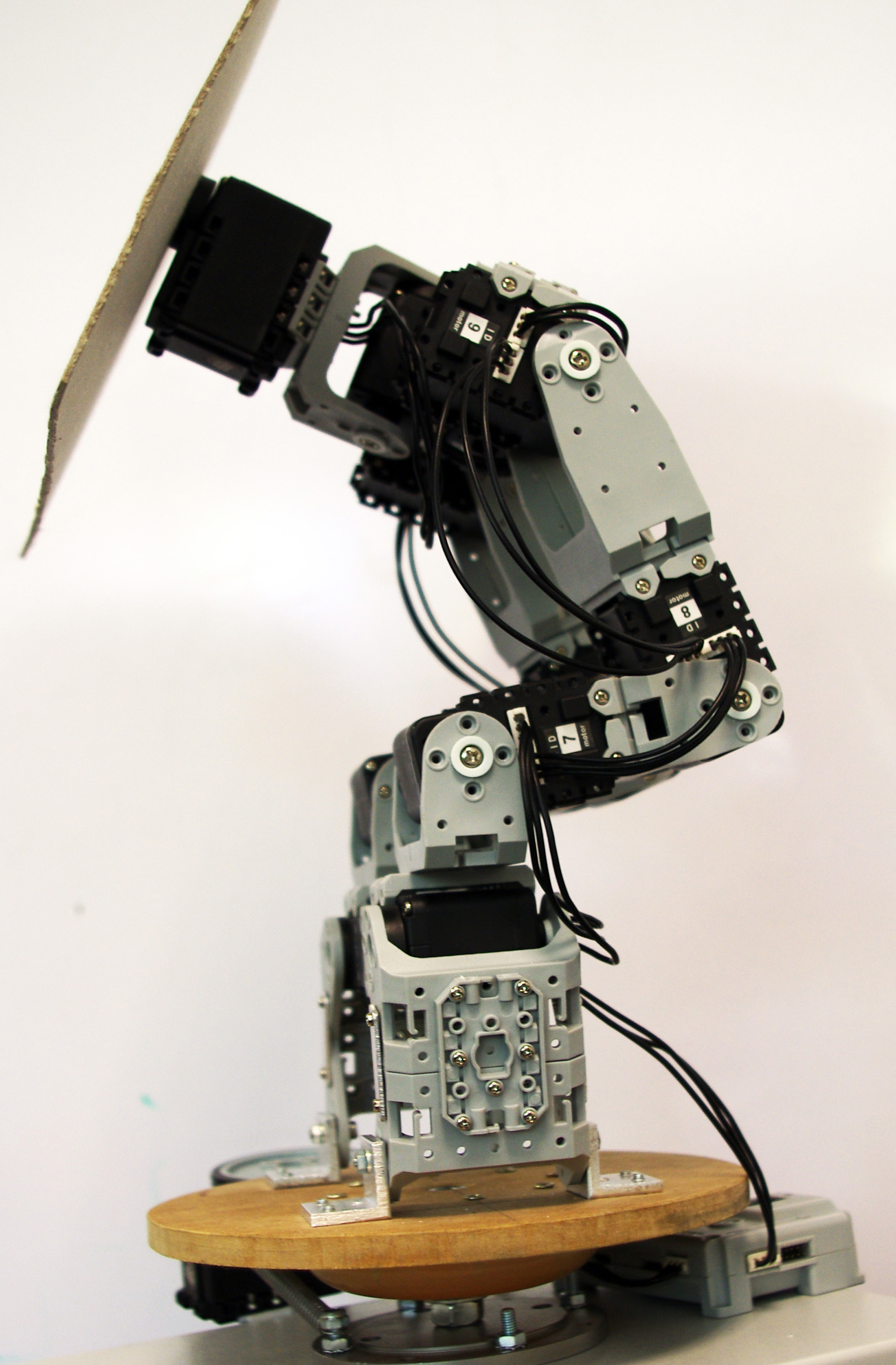
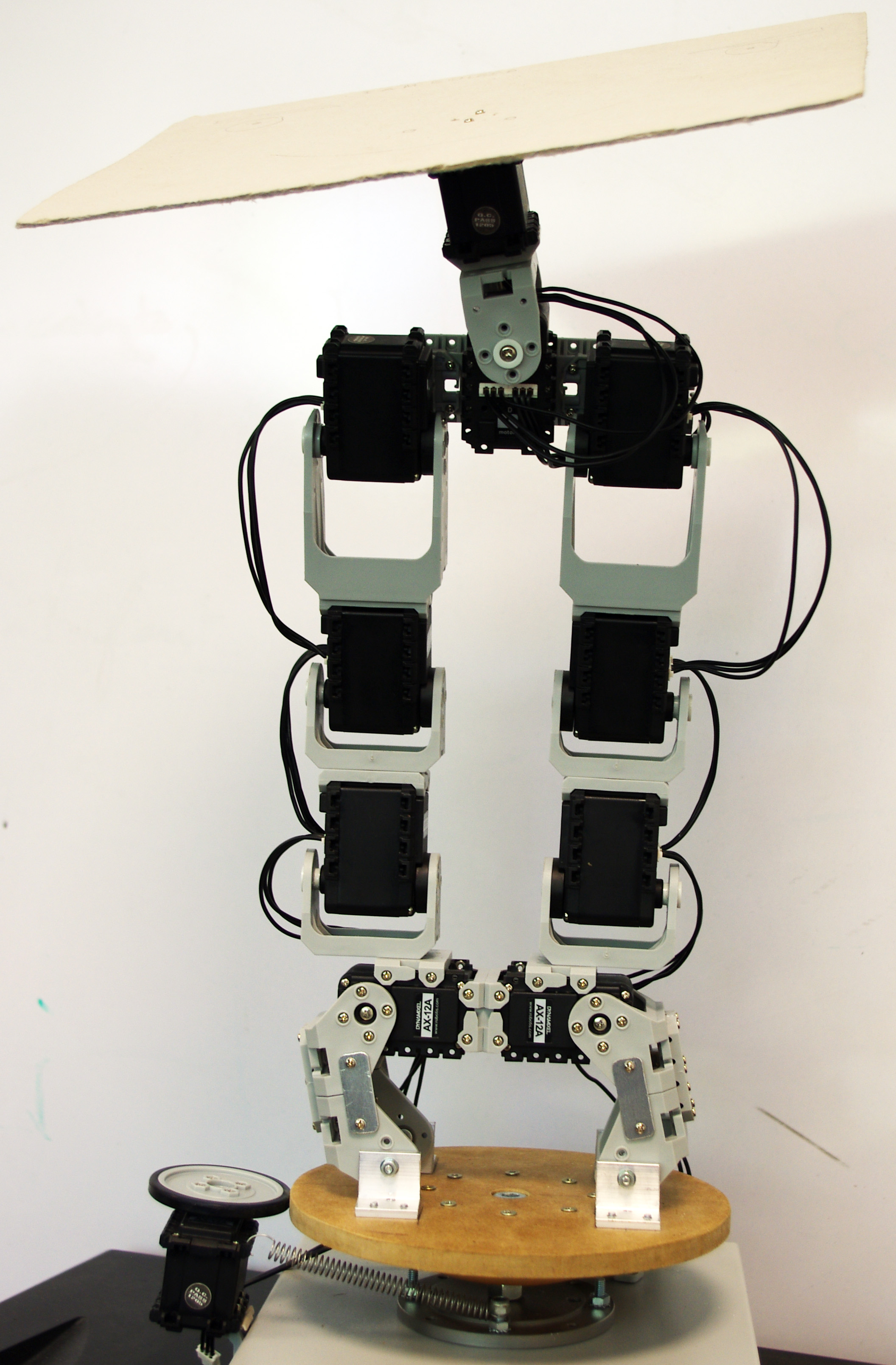
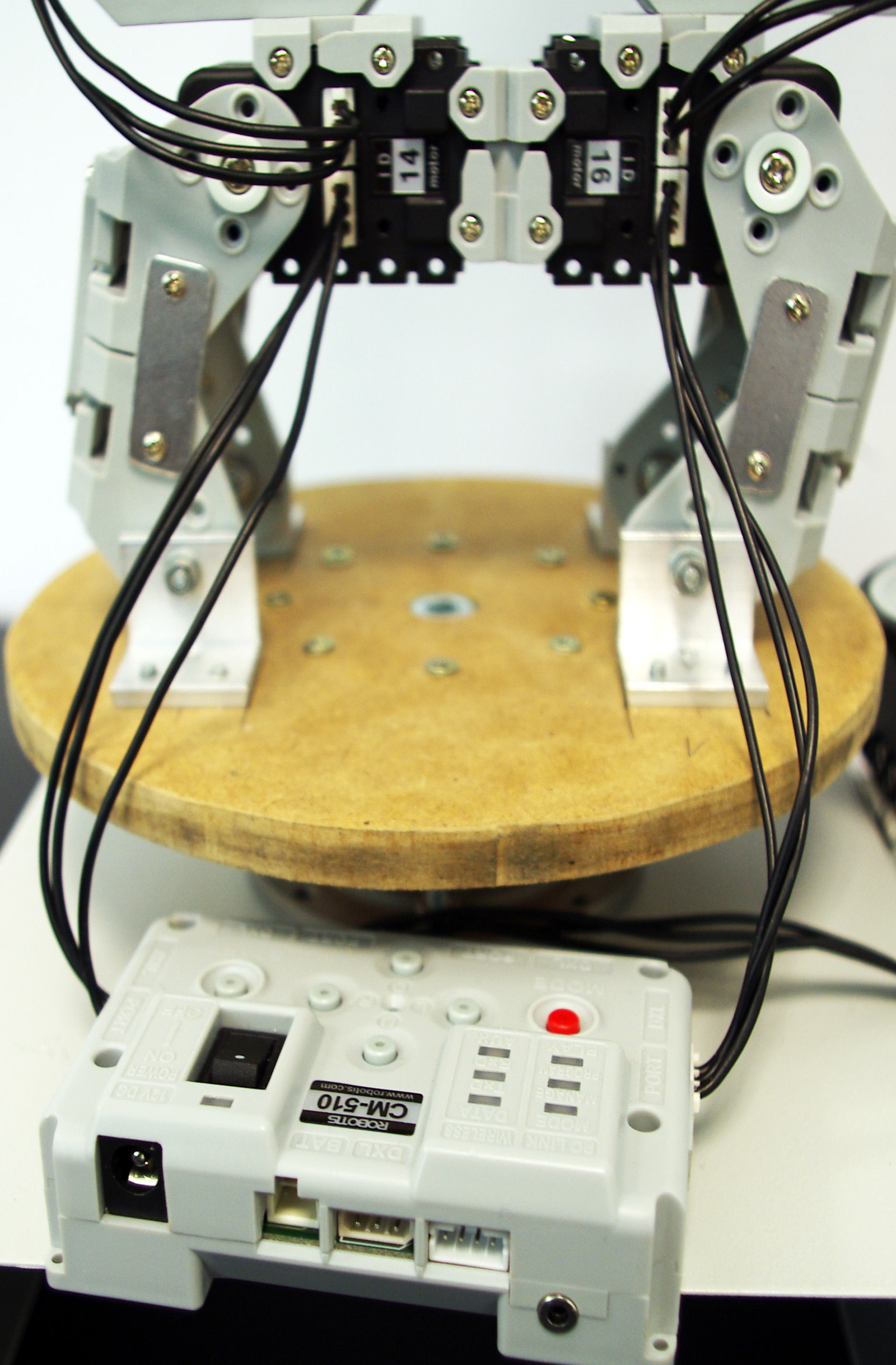
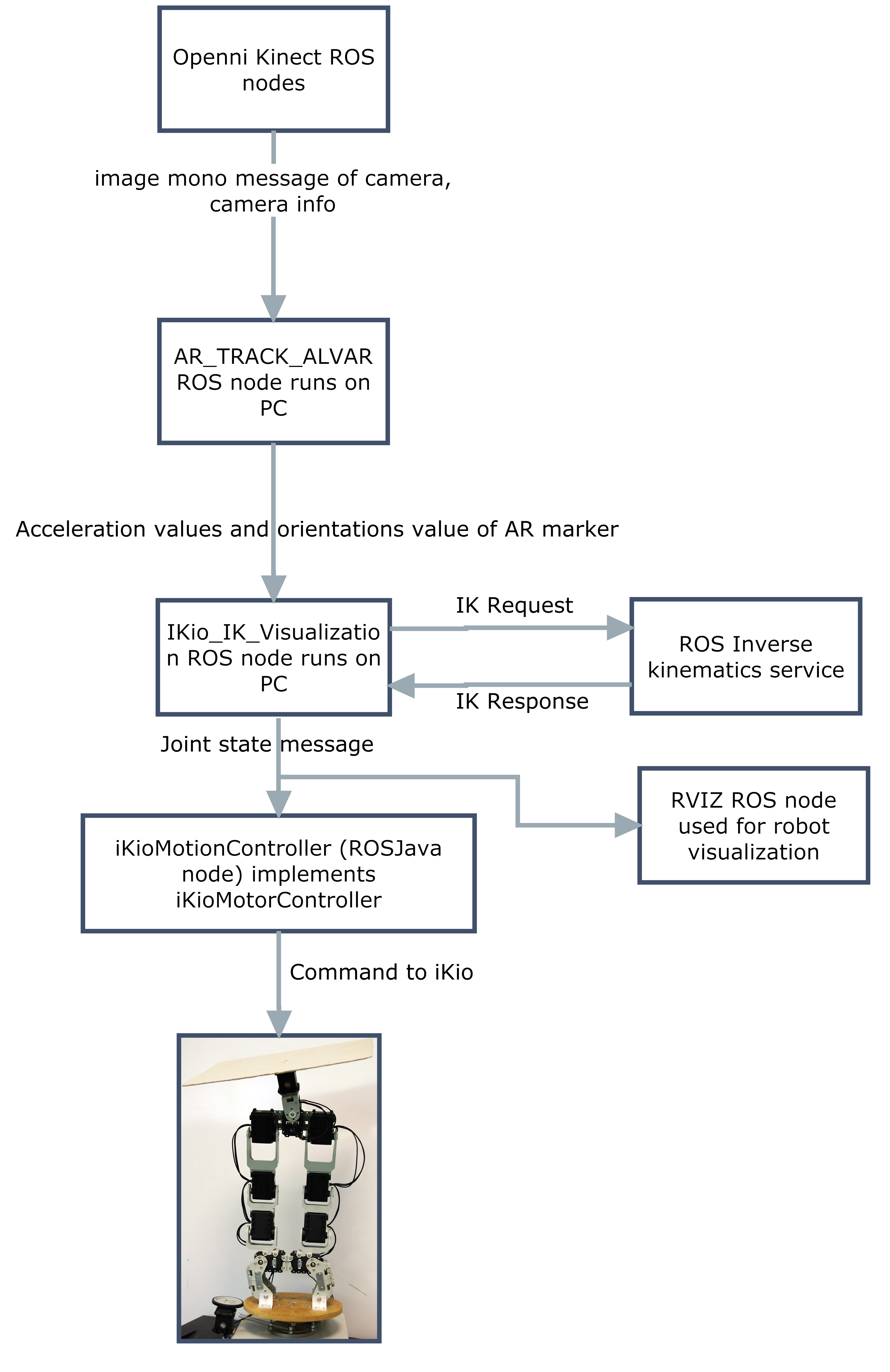
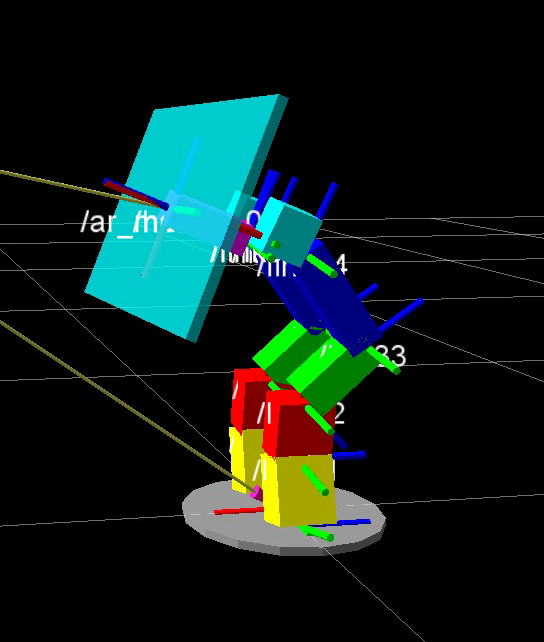
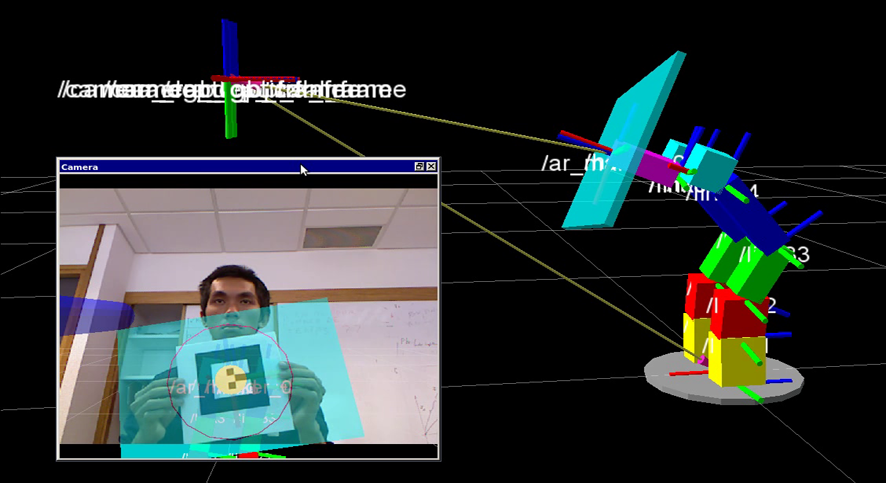
Using ROS for Prototyping Robots
Conclusion and Perspectives
Live Demonstration
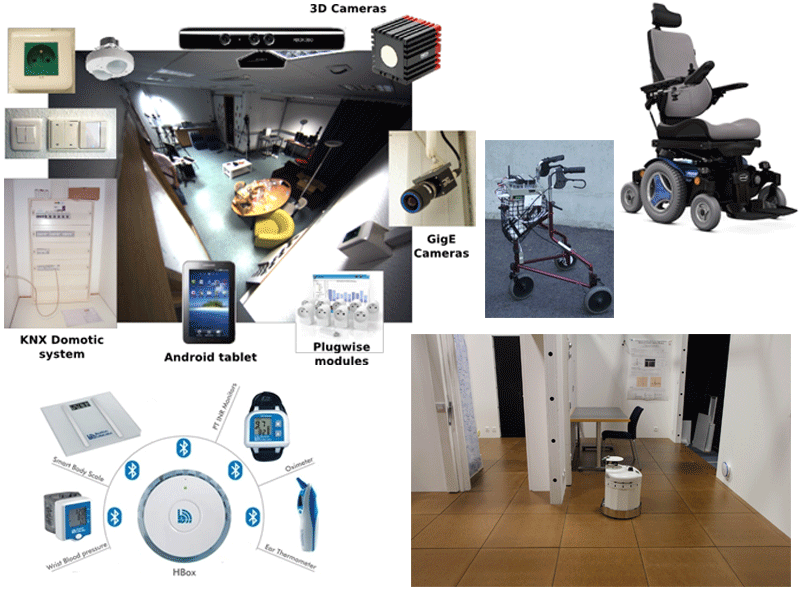
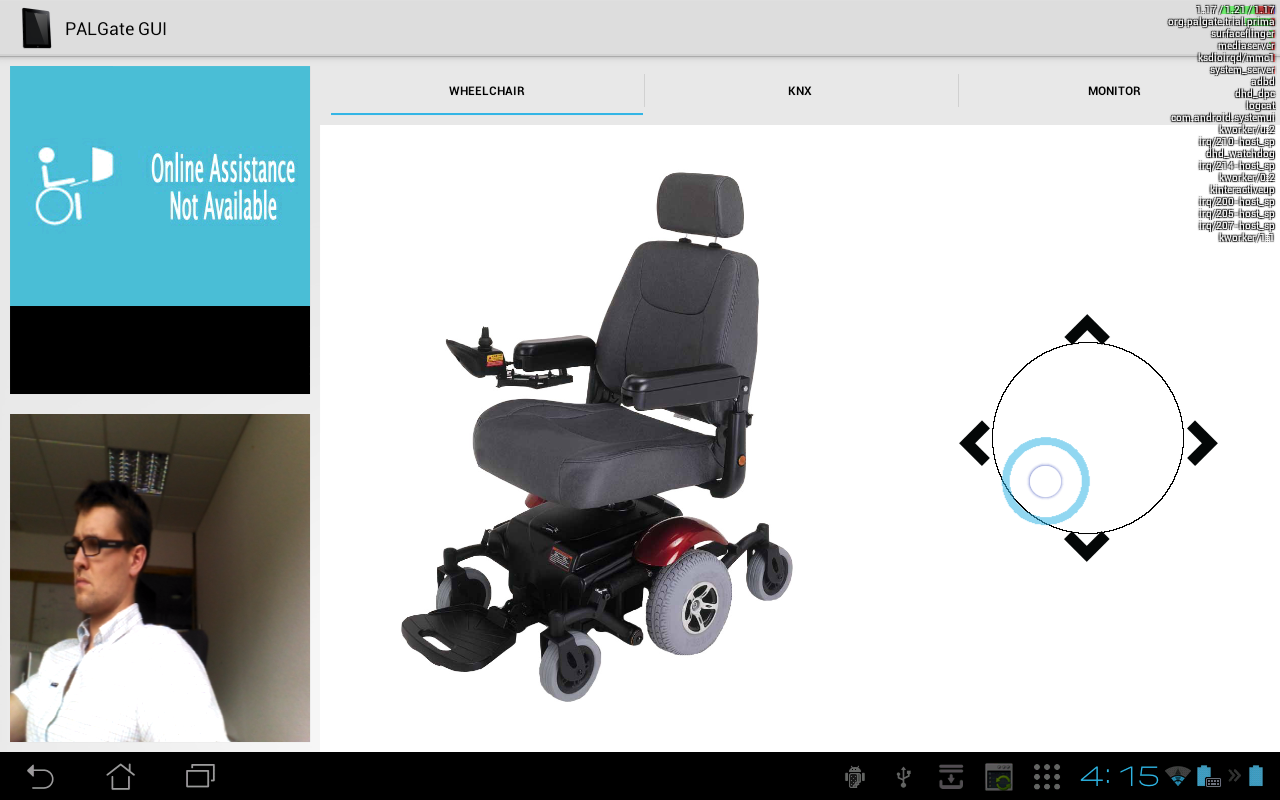
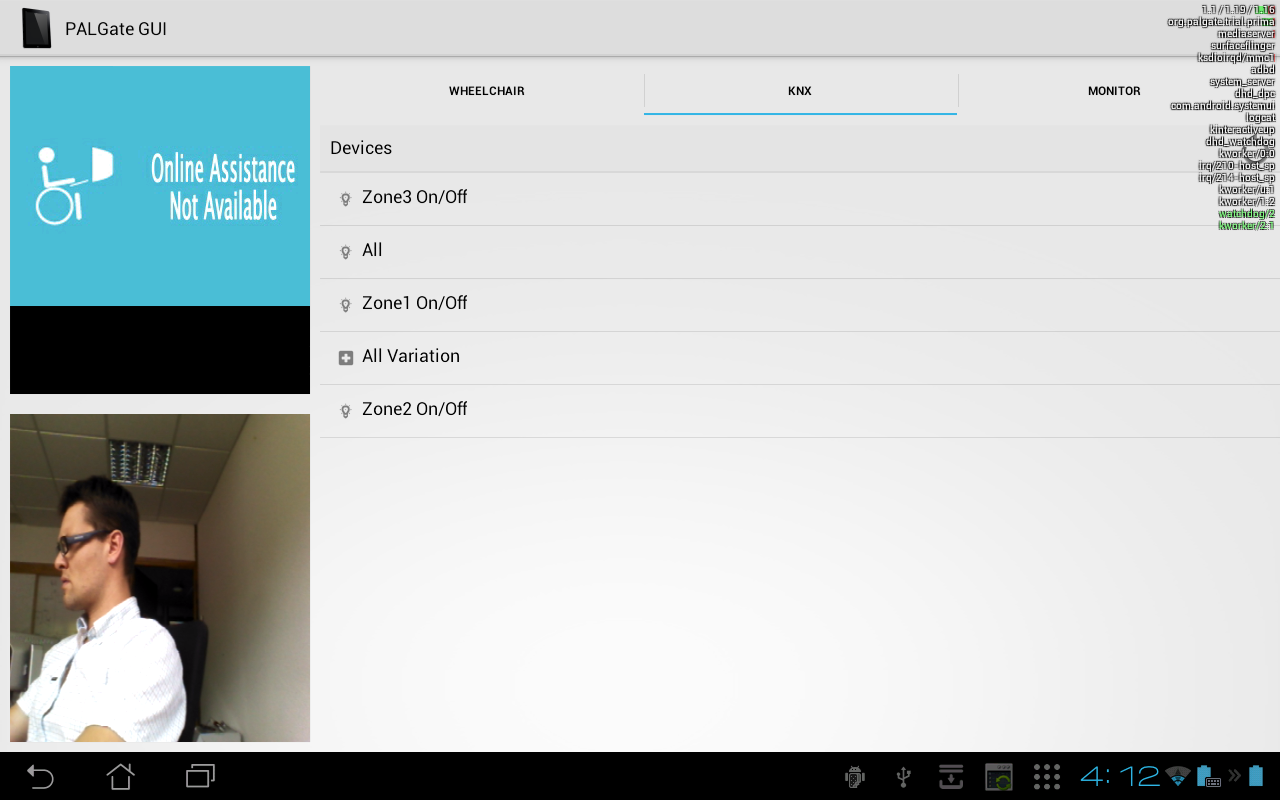
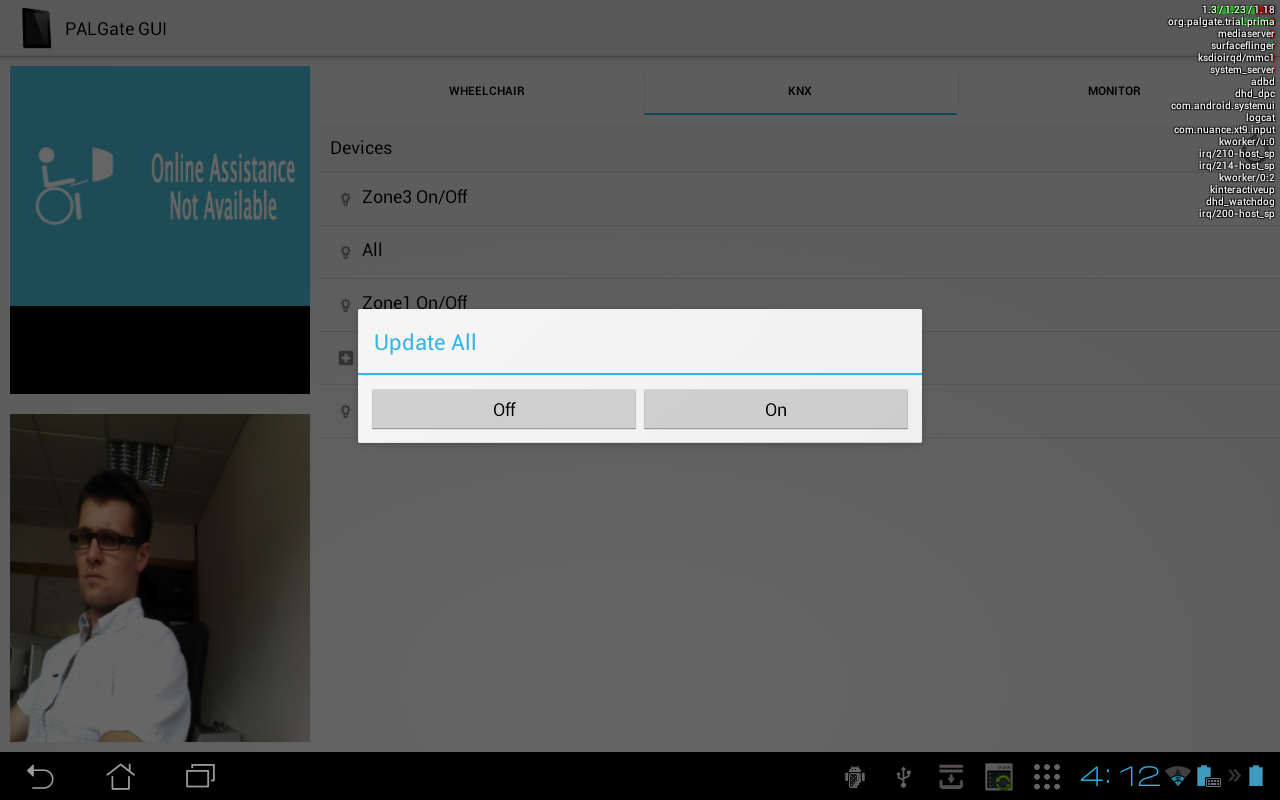
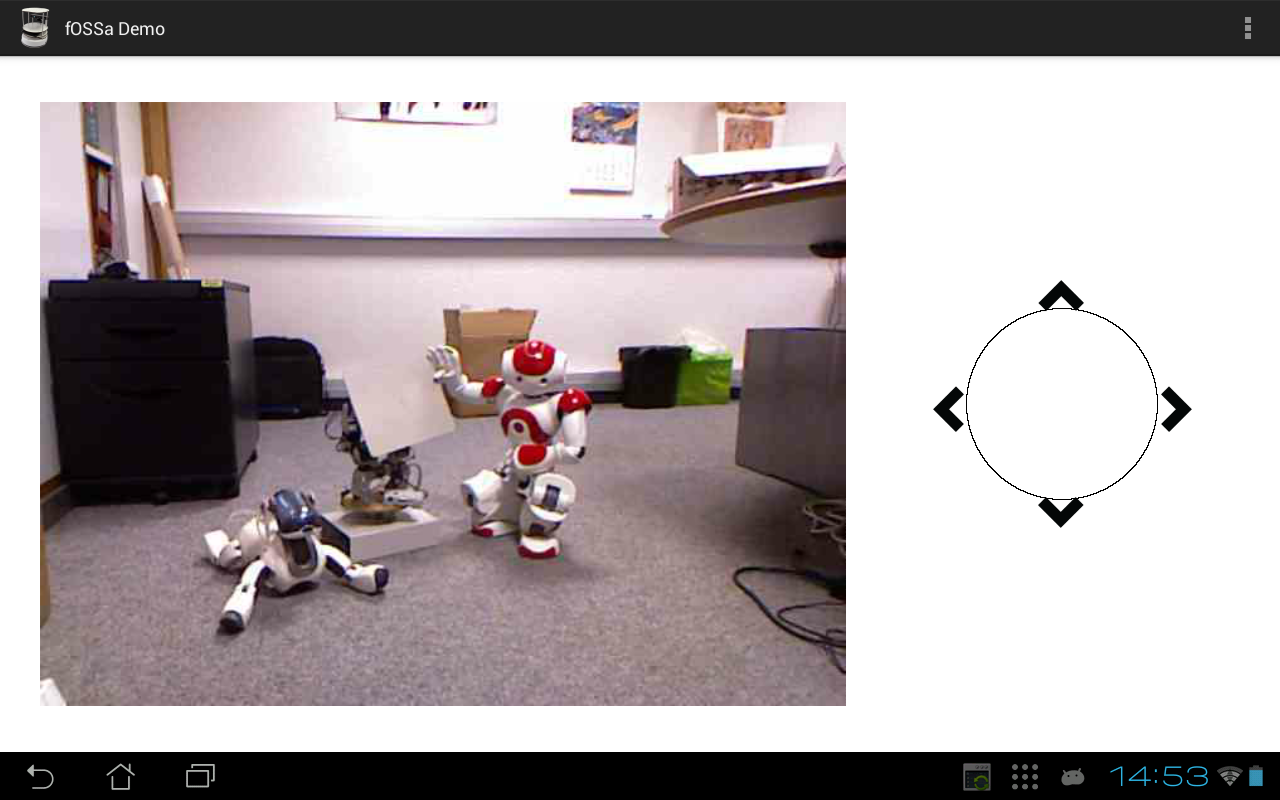
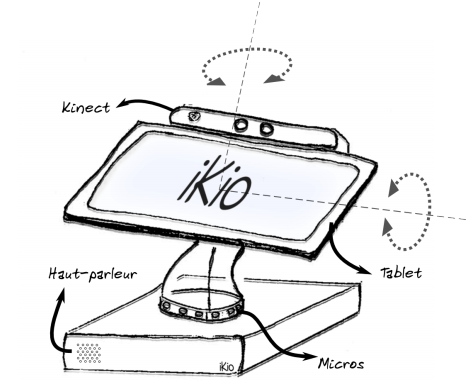
Using ROS for Personally Assisted Living Applications
Personally Assisted Living Application
focusing on the INRIA Large Scale Initiative Action on Personally Assisted Living (http://pal.inria.fr)
PAL Application
Development of technologies that can provide services for improving the quality of life for elderly and fragile persons, as well as their immediate family, caregivers and social groups
Heterogenous, distributed and mobile platforms and technologies




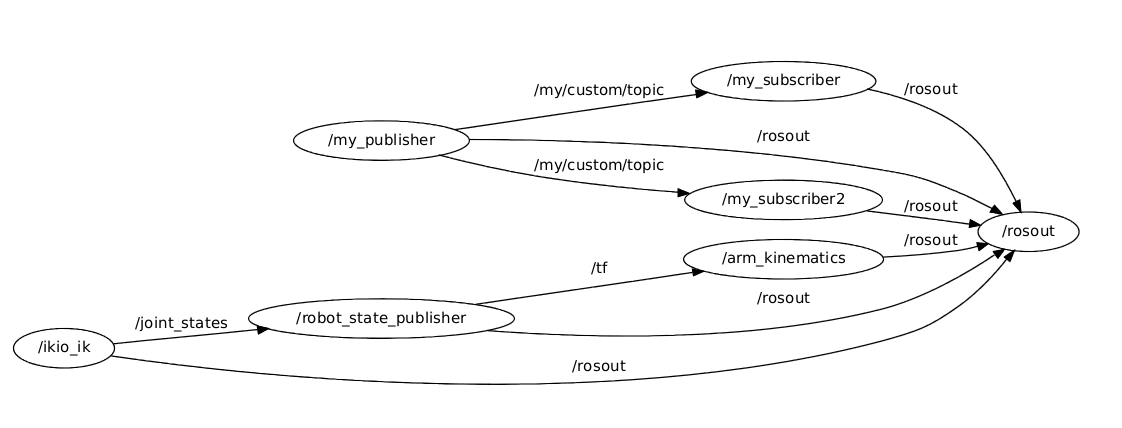
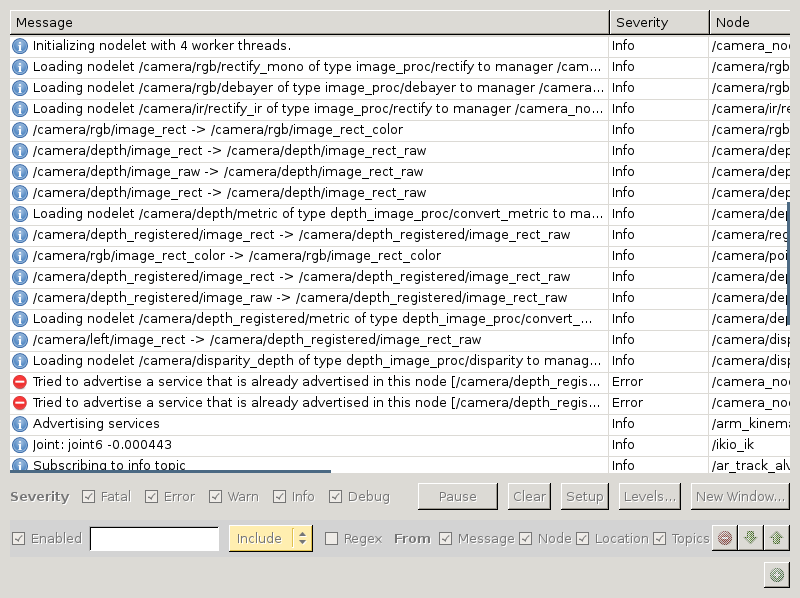
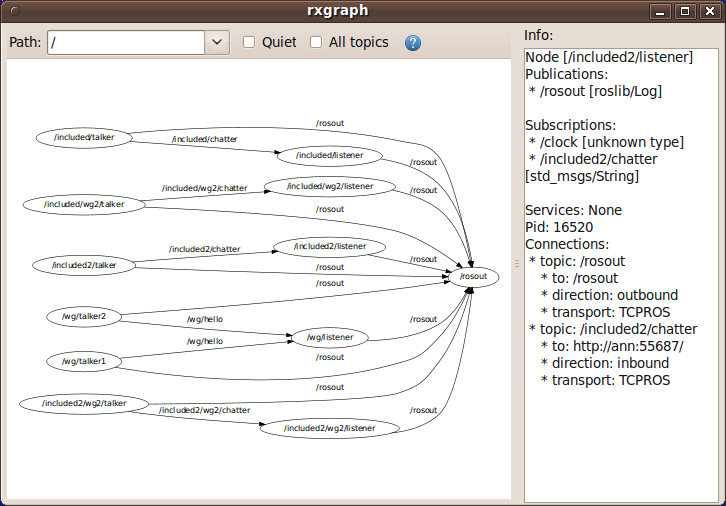 Message Introspection
Message Introspection